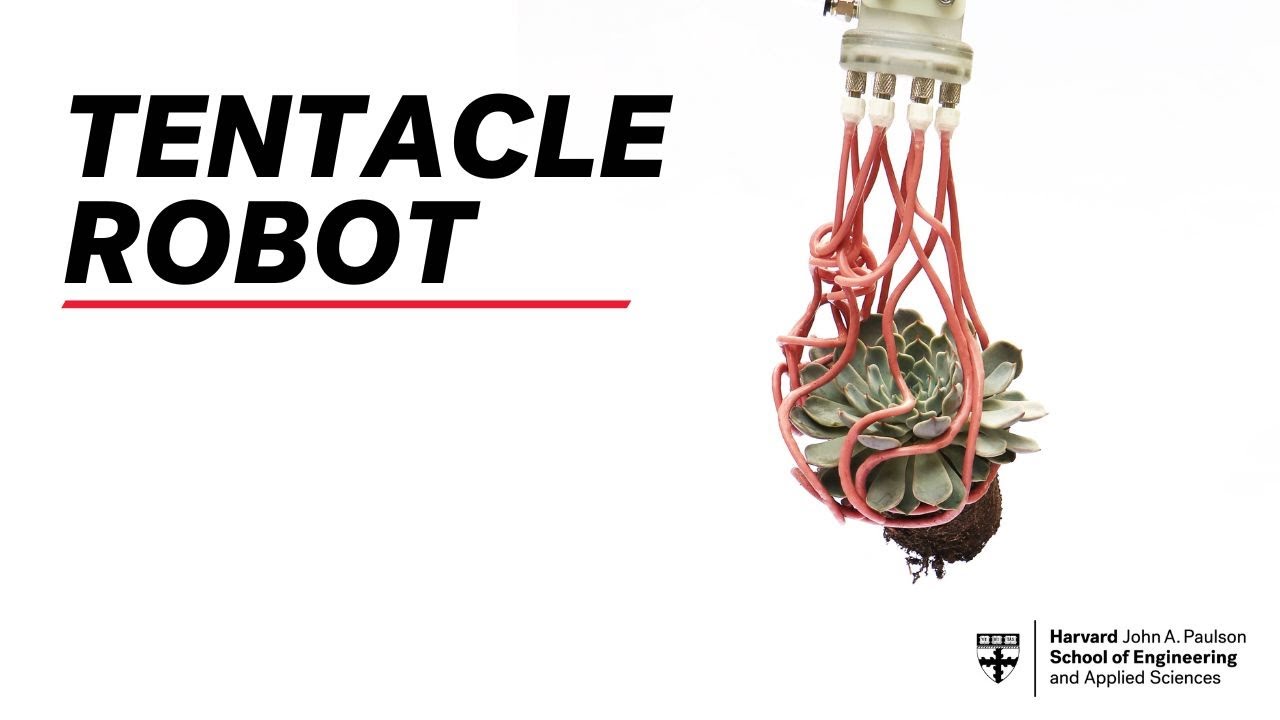
触手ロボットが壊れやすいものを優しくつかむ
以下は、記事の抜粋です。
現在のロボットのほとんどは、壊れやすいものや不規則な形状のものをつかむために、内蔵センサーや複雑なフィードバックループ、高度な機械学習アルゴリズム、そしてオペレーターのスキルに依存している。しかし、ハーバード大学の研究者たちは、より簡単な方法を実証した。
自然界からヒントを得て、クラゲが気絶した獲物を捕らえるのと同じように、細い触手の集合体を使って対象物を絡め取る、新しいタイプの柔らかいロボットグリッパーを設計したのだ。
個々の触手(フィラメント)は単独では弱い。しかし、触手の集合体は、重いものや奇妙な形のものをしっかりとつかむことができる。このグリッパーは、単純な膨張を利用して物体を包み込むため、センシングやプランニング、フィードバック制御を必要としない。
このグリッパーの強度と適応性は、把持しようとする物体に自分自身を絡ませる能力から生まれる。足ほどの長さのフィラメントは、中が空洞のゴムチューブになっている。片側のゴムがもう片方より太いので、加圧されると、おさげ髪や雨の日の縮毛矯正のようにカールする。このカールは、互いに、また対象物に結びついたり絡まったりして、絡まるたびにホールドの強さが増していく。集合的な保持力は強いのですが、一つ一つの接触は弱く、どんなに壊れやすいものでも傷つけません。対象物を解放するには、フィラメントを減圧するだけである。
研究者らは、シミュレーションと実験により、さまざまな観葉植物やおもちゃなど、さまざまな物体をつまんで、グリッパーの有効性を検証した。
元論文のタイトルは、「アクティブなエンタングルメントが確率的・位相的な把持を可能にする Active entanglement enables stochastic, topological grasping」です(論文をみる)。よくわからないですが、画期的な発見のようです。
コメント